About
Leiyao Cui received his B.Eng. degree in Electronic Information Engineering from Beijing Institute of Technology (BIT) in 2024. He is currently a Ph.D. student in Pattern Recognition and Intelligent System at University of Chinese Academy of Sciences (UCAS), where he began in 2024, and a research intern at Peking University (PKU). He is co-advised by Prof. Yixin Zhu (PKU) and Prof. Zhi Han (UCAS).
Interests
3D Vision
Robotic Perception
Robot Manipulation
Recent Publications
arXiv 25
arXiv preprint arXiv:2510.06339, 2025
NeurIPS 25
Proceedings of the Neural Information Processing Systems Track on Datasets and Benchmarks, 2025
RA-L 25
IEEE Robotics and Automation Letters, 2025
arXiv 25
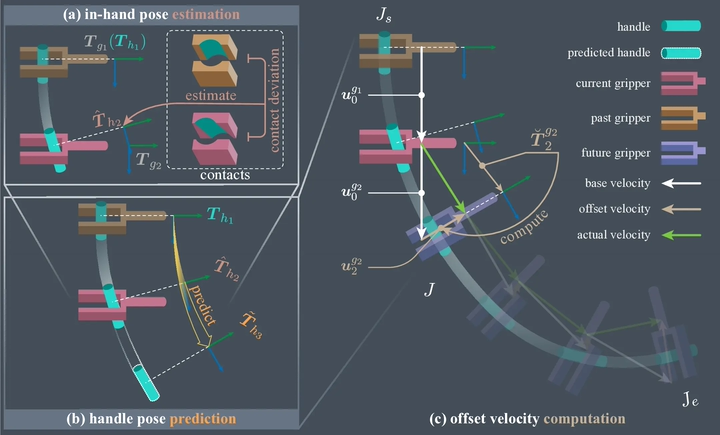
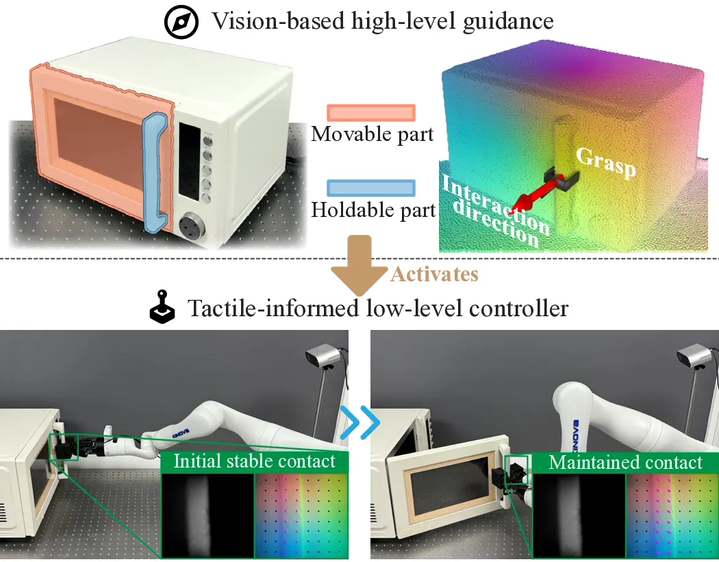
TacMan-Turbo: Proactive Tactile Control for Robust and Efficient Articulated Object Manipulation
arXiv preprint arXiv:2508.02204, 2025
arXiv 25

arXiv preprint arXiv:2503.03556, 2025